FetchBot
The FetchBot is a Lego MindStorms robot that can find an object, pick it up and drop it somewhere else.
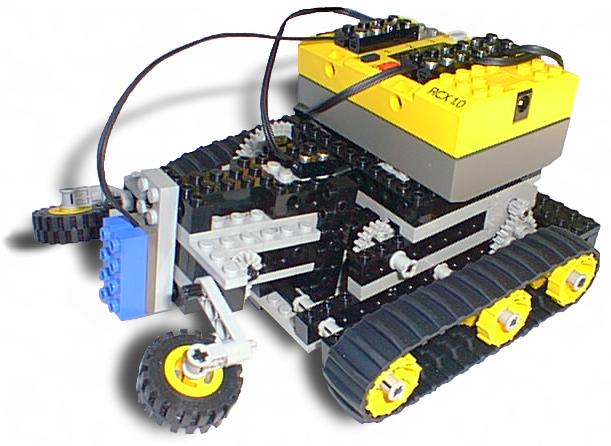
A single motor drives the grabber and the arm. Here's how:
 |
 |
|
A touch-switch is closed when the arm is at the top of its travel. The grabber is fully open in this position. |
A pair of cams under the robot lower the arm onto the block, while the grabber closes. |
 |
 |
|
When the grabber meets the block and can close no further, the arm moves with the axle that was driving the grabber... |
...and the arm is raised holding the block until it closes the touch-switch at the top of its travel again. |
Click on the FetchBot below to view a larger animation. (135kB)
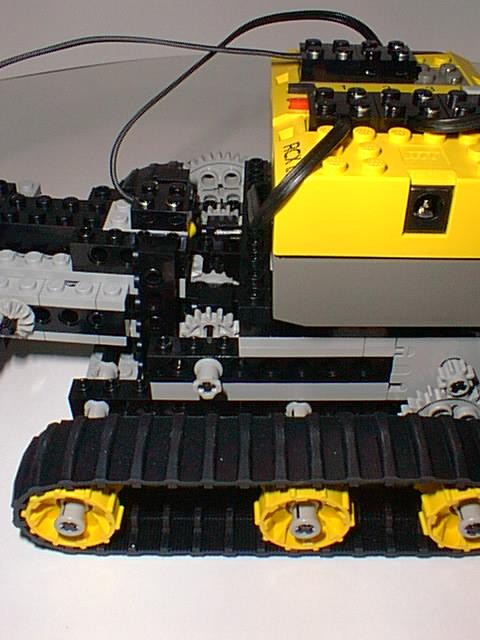
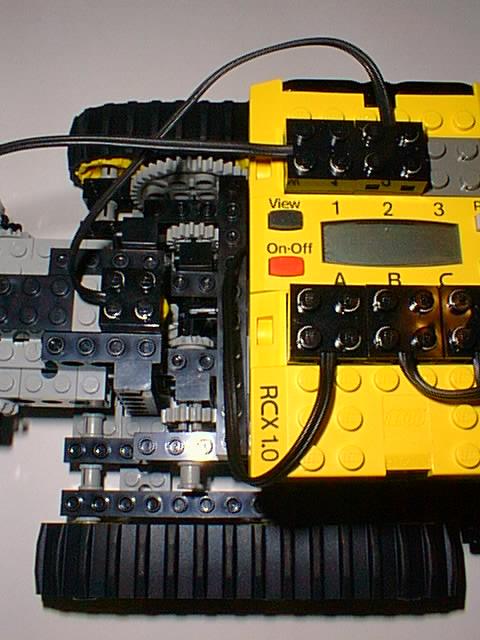
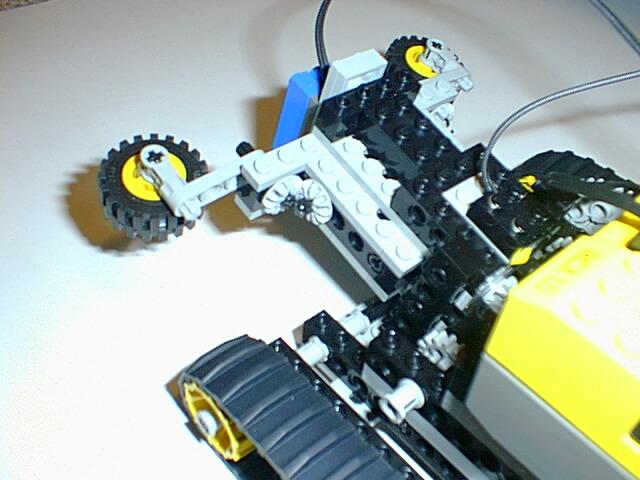
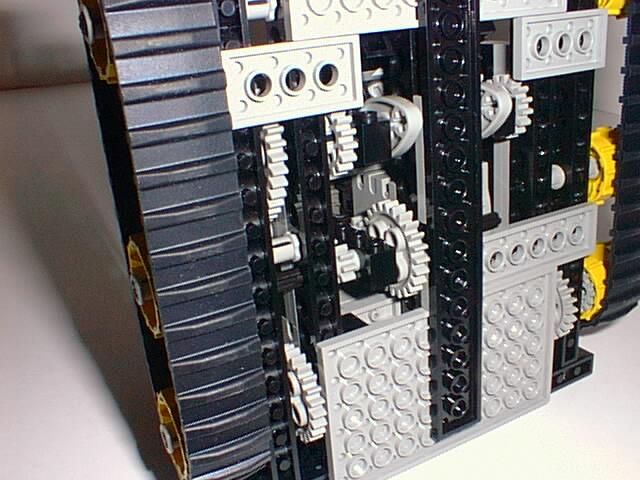
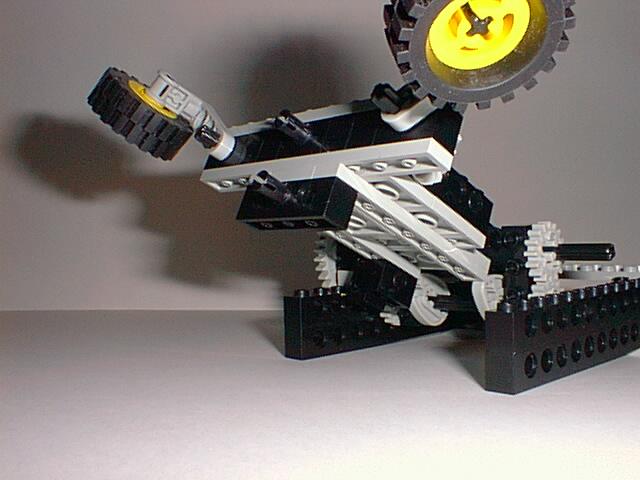
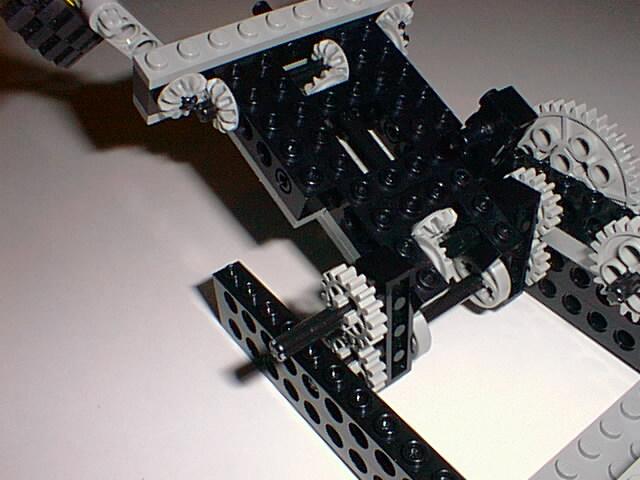
More photos of the FetchBot:
 |
 |
 |
 |
 |
 |
 |
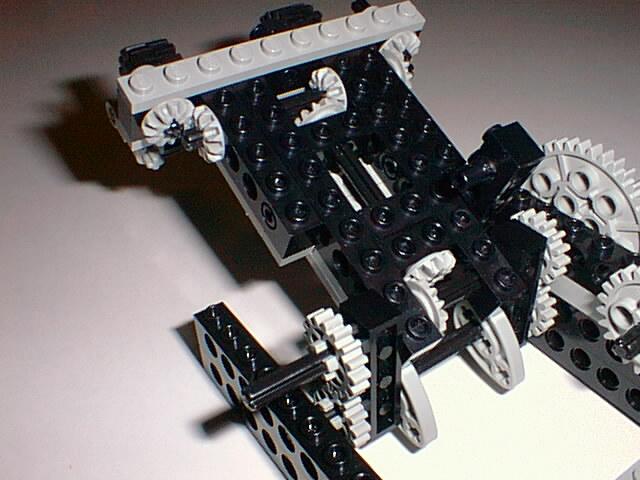 |
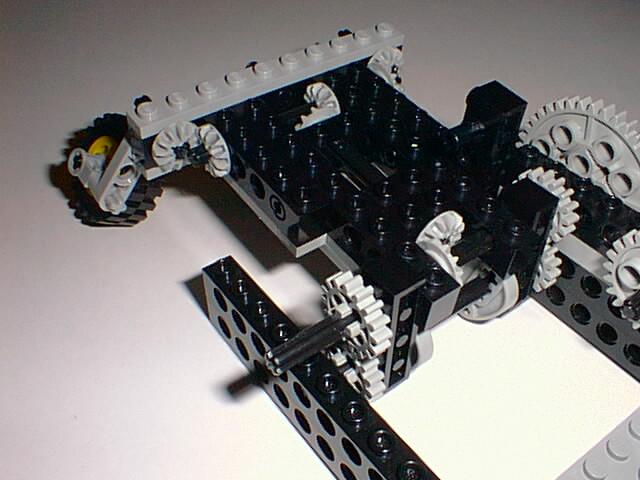
Everything is driven by the big gear: when it rotates counter-clockwise (with respect to the photos above) the cams push the arm up while the grabber opens wide. When it rotates clockwise, the grabber closes until it can't anymore. When the axle that moves the grabber can't rotate, the arm becomes locked to the main axle (the one with the big gear) and the whole arm lifts up. This puts a fair bit of strain on the small gears where the arm axle and the main axle meet, which is why there is a lot of reinforcing at the base of the arm. Otherwise the arm axle just pops out of the arm!
The FetchBot files:
- fetchbot.nqc source, for use with NQC

Copyright © 1998 Ben Williamson